



水中ロボットカメラ漏水検知システム
2026/04/28 更新-
水中ロボットカメラ_漏水検知システム_施工例
-
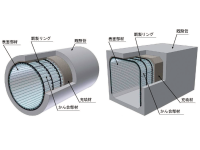
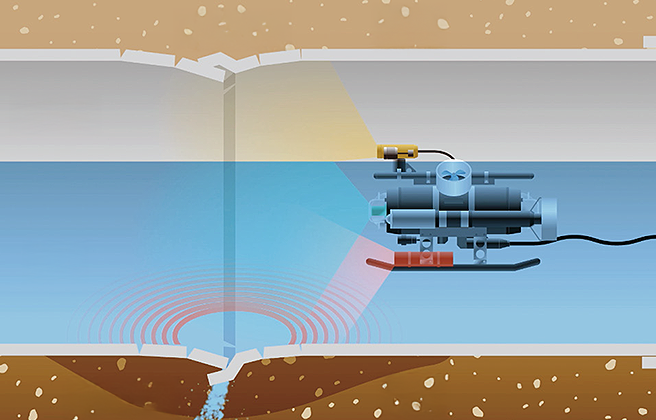
水中ロボットカメラ_漏水検知システム_施工概要図
-
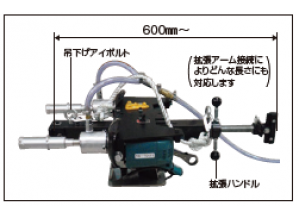
水中ロボットカメラ単体
-
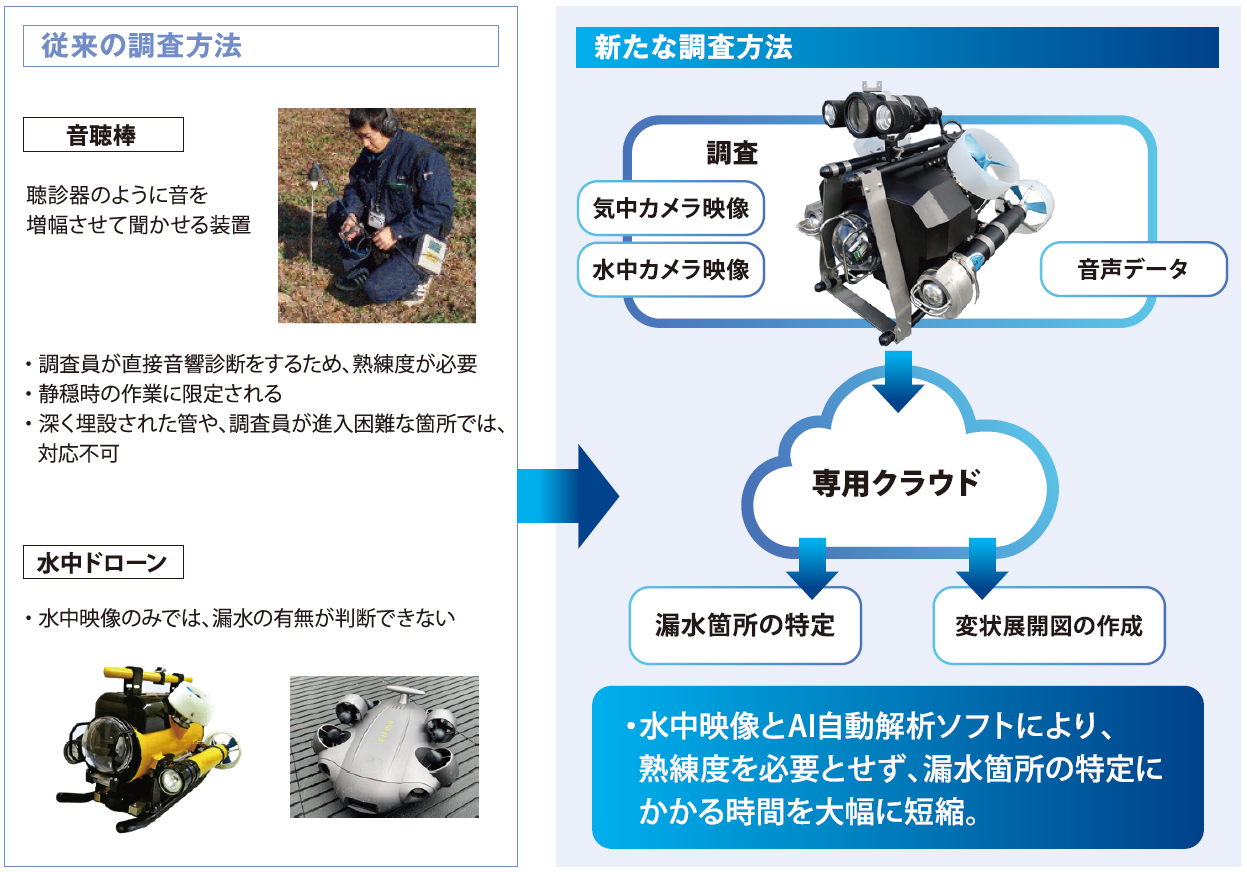
従来技術と新技術の概要比較
-
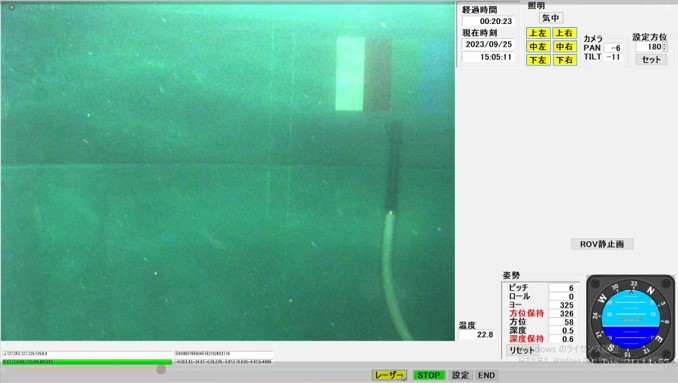
計測中パソコン画面
NETIS登録番号:KT-240111-A
概要
本技術は、水中ロボットカメラを活用した水中・気中部の撮影、漏水検知システムである。水中ロボットカメラに搭載した集音・撮影機能を用いて、水路や管渠内の漏水、破損箇所の特定を行う。従来の技術では、埋設管漏水箇所の特定には音聴棒を用いるか、水路・管渠内に潜水士が入って目視点検・撮影が必要となっていた。これに対し本技術では、水中ロボットカメラによる漏水箇所特定調査および異常箇所撮影が可能となったことで、安全性および施工性が向上した。
従来技術
潜水士による目視点検調査、音聴棒による地上からの音響診断
公的評価番号等
特許第7169511号
新規性
水路や管渠内の漏水および破損箇所の特定方法について、音聴棒での漏水箇所特定と潜水士による目視点検調査から、水中ロボットカメラのみで全てできるよう変更したこと。
期待される効果
1.水中ロボットカメラに変更したことで以下の効果を期待できる。
(1)撮影・集音の同時調査が可能たなめ工程の短縮を図ることができる
(2)潜水士が管路内に進入しないため、安全性の向上を図ることができる
(3)潜水士では困難な水深200mまで調査可能なため、施工性の向上を図ることができる
(4)静穏時でなくても調査が可能なため、施工性の向上を図ることができる
2.その他
水中部のみならず気中部の同時撮影、グリーンラインレーザー搭載(100mm間隔2本投影)による映像での寸法確認ができ、定量的な調査が可能となる。誤差3mm以内。
(1)撮影・集音の同時調査が可能たなめ工程の短縮を図ることができる
(2)潜水士が管路内に進入しないため、安全性の向上を図ることができる
(3)潜水士では困難な水深200mまで調査可能なため、施工性の向上を図ることができる
(4)静穏時でなくても調査が可能なため、施工性の向上を図ることができる
2.その他
水中部のみならず気中部の同時撮影、グリーンラインレーザー搭載(100mm間隔2本投影)による映像での寸法確認ができ、定量的な調査が可能となる。誤差3mm以内。
適用条件
1.適用箇所
⑴上下水道維持管理工事
⑵水路・管渠内点検調査
⑶水中構造物の調査点検
⑷浄水場配水池・配水塔・貯水槽施設の調査点検
⑸ダム法面
⑹沈砂池
2.適用範囲
⑴適用可能な範囲
①最大調査延長:300m
②最大調査水深:200m
③最低水深:0.6m
④最小管径:1m
⑤動作可能な流速:0.5 m/s
⑥水質条件:濁った水中や、ヘドロなどの多く堆積した水路内では使用できない可能性あり
⑵特に効果の高い適用範囲
①水路、管渠内点検
②潜水士による潜水作業が不要となるため、潜水士に危険が伴う箇所
3.適用条件
⑴自然条件
・動作水温5~35℃
⑵現場条件
①水中での作業(最低水深:600mm)
②外形寸法約650mm×580mm×580mmが搬入可能なこと
③管内流速制限:0.5 m/s程度
⑶技術提供可能地域
・技術提供地域については制限無し
⑴上下水道維持管理工事
⑵水路・管渠内点検調査
⑶水中構造物の調査点検
⑷浄水場配水池・配水塔・貯水槽施設の調査点検
⑸ダム法面
⑹沈砂池
2.適用範囲
⑴適用可能な範囲
①最大調査延長:300m
②最大調査水深:200m
③最低水深:0.6m
④最小管径:1m
⑤動作可能な流速:0.5 m/s
⑥水質条件:濁った水中や、ヘドロなどの多く堆積した水路内では使用できない可能性あり
⑵特に効果の高い適用範囲
①水路、管渠内点検
②潜水士による潜水作業が不要となるため、潜水士に危険が伴う箇所
3.適用条件
⑴自然条件
・動作水温5~35℃
⑵現場条件
①水中での作業(最低水深:600mm)
②外形寸法約650mm×580mm×580mmが搬入可能なこと
③管内流速制限:0.5 m/s程度
⑶技術提供可能地域
・技術提供地域については制限無し
施工事例・施工実績
工事採用実績
- 公
- 1
- 民
- 4
提供可能地域
北海道 東北 関東 北陸 中部 近畿 中国 四国 九州 沖縄
施工手順
会社情報
- 会社名
- (株)ウオールナット
- TEL
- 042-537-3838
- 企業情報
- 公式サイト