






歩道探査ロボット Side Walker-R
2026/04/28 更新-
歩道探査ロボット Side Walker-R その1
-
歩道探査ロボット Side Walker-R その2
-
自律走行
-
測線管理
-
AI自動解析
NETIS登録番号:申請準備中
概要
自律走行と自動計測可能な歩道探査ロボット。省人化や効率化を図りながらも、計測漏れによる空洞見落としを無くし、路面陥没事故を未然に防ぐことが可能。従来のように人がマシンを手押しで計測するタイプではなく、位置情報などを取得し、自動で走行・計測を行う。これにより、従来よりも効率的かつ低コストで維持管理が可能となった。
従来技術
手押し型地中レーダー探査機
新規性
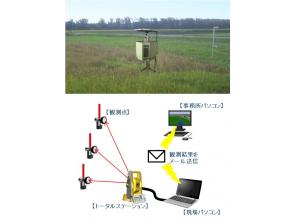
1.自律走行が可能となった
熟練作業員が不要で自律走行(ボタン1つの簡易な操作)
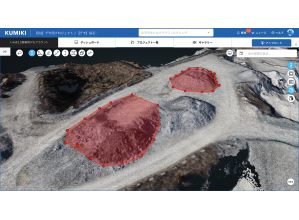
2.測線管理が可能となった
測線範囲を事前に決めれば、ロボットが自律走行計測を行う
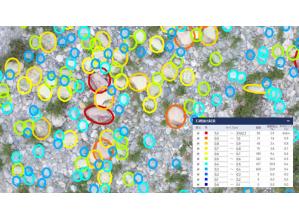
3.AI自動解析が可能となった
AIにより偏りのない正確な判定を提供
熟練作業員が不要で自律走行(ボタン1つの簡易な操作)
2.測線管理が可能となった
測線範囲を事前に決めれば、ロボットが自律走行計測を行う
3.AI自動解析が可能となった
AIにより偏りのない正確な判定を提供
期待される効果
1.自立走行により
長時間の作業による体力の消耗や大型機材による作業がなくなる
2.測線管理により
作業者の疲労や長時間の作業による探査測線漏れがなくなる
3.AI自動解析により
技術者の経験不足や疲労によって、判定に偏りが出る事がなくなる
長時間の作業による体力の消耗や大型機材による作業がなくなる
2.測線管理により
作業者の疲労や長時間の作業による探査測線漏れがなくなる
3.AI自動解析により
技術者の経験不足や疲労によって、判定に偏りが出る事がなくなる
適用条件
適用箇所:
歩道における空洞探査、探査測線管理、および自動解析
歩道における空洞探査、探査測線管理、および自動解析
施工事例・施工実績
提供可能地域
北海道 東北 関東 北陸 中部 近畿 中国 四国 九州 沖縄
施工手順

会社情報
- 会社名
- (株)ウオールナット
- TEL
- 042-537-3838
- 企業情報
- 公式サイト