





水上ロボットによる通水時の機能診断技術
2026/04/28 更新-
水上ロボット
-
寸法・重量
-
施工例
-
水上ロボット実証実験状況
NETIS登録番号:KK-240035-A
概要
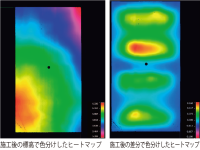
断水が出来ない水路トンネル等の変状撮影、空洞探査、断面計測がおこなえる。従来技術では抜水しての調査が必要であり、調査事前準備や人件費等に多くの時間、費用等が発生し非効率であったが、抜水が不要となり、ロボットを流すだけで調査できる
従来技術
水路内の抜水後、人による計測、点検
新規性
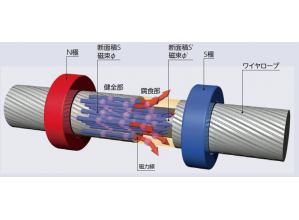
従来技術では、水路トンネル内の水を断水・抜水後に人が進入して調査(人海戦術による近接目視)、もしくは接触型レーダ探査による方法などで実施していた。新技術では、制御機能を有するフロートにカメラと非接触型レーダを搭載したロボットを、水路に流下させるだけで調査が可能となる
期待される効果
機器を流すだけで計測が可能となり、計測延長が長い場所でも人員の数を削減して計測が可能となったことで省人化となり、経済性・安全性・施工性向上が期待される。機器を流すだけで、水路内部の壁面撮影、背面空洞、気中部の断面を計測できることから変状箇所を容易に抽出することが可能となったので、工程短縮と周辺環境への影響抑制が期待される。
適用条件
1.適用箇所
⑴社会インフラ等における水路等
⑵農水が管理する水路
⑶その他の水路や開水路
2.適用範囲
⑴適用可能な範囲
①流速2.0m/s未満
②水深0.5m以上
※電磁波レーダ使用時
・コンクリートの骨材に磁性体が含まれていない場合
・鉄板防護など、磁性体が測定表面に施されていない場合
⑵特に効果の高い適用範囲
トンネル延長が長く、大量の目視点検やレーダ探査が必要な場合に高い適用性を示す
⑶適用できない範囲
①流速2.0m/s以上ある場倍
②水深0.5m以下の場合
※電磁波レーダ使用時
・コンクリートの骨材に磁性体が含まれている場合
・鉄板防護など、磁性体が測定表面に施されている場合
3.適用条件
⑴自然条件
水路に進入不可能な雨量、流速は調査不可
⑵現場条件
①流速2.0m/s未満
②水深0.5m以上
③Φ600㎜以上の搬入口が必要
⑶技術提供可能地域
技術提供可能地域については制限なし
⑴社会インフラ等における水路等
⑵農水が管理する水路
⑶その他の水路や開水路
2.適用範囲
⑴適用可能な範囲
①流速2.0m/s未満
②水深0.5m以上
※電磁波レーダ使用時
・コンクリートの骨材に磁性体が含まれていない場合
・鉄板防護など、磁性体が測定表面に施されていない場合
⑵特に効果の高い適用範囲
トンネル延長が長く、大量の目視点検やレーダ探査が必要な場合に高い適用性を示す
⑶適用できない範囲
①流速2.0m/s以上ある場倍
②水深0.5m以下の場合
※電磁波レーダ使用時
・コンクリートの骨材に磁性体が含まれている場合
・鉄板防護など、磁性体が測定表面に施されている場合
3.適用条件
⑴自然条件
水路に進入不可能な雨量、流速は調査不可
⑵現場条件
①流速2.0m/s未満
②水深0.5m以上
③Φ600㎜以上の搬入口が必要
⑶技術提供可能地域
技術提供可能地域については制限なし
施工事例・施工実績
工事採用実績
- 公
- 10
- 民
- 3
提供可能地域
北海道 東北 関東 北陸 中部 近畿 中国 四国 九州 沖縄
施工手順

会社情報
- 会社名
- (株)ウオールナット
- TEL
- 042-537-3838
- 企業情報
- 公式サイト