


吊荷姿勢制御装置
2024/08/30 更新-
吊荷姿勢制御装置
-
据付作業(本技術使用)
NETIS登録番号:HRK-180001-A
概要
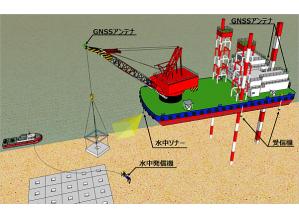
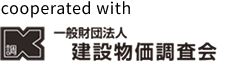
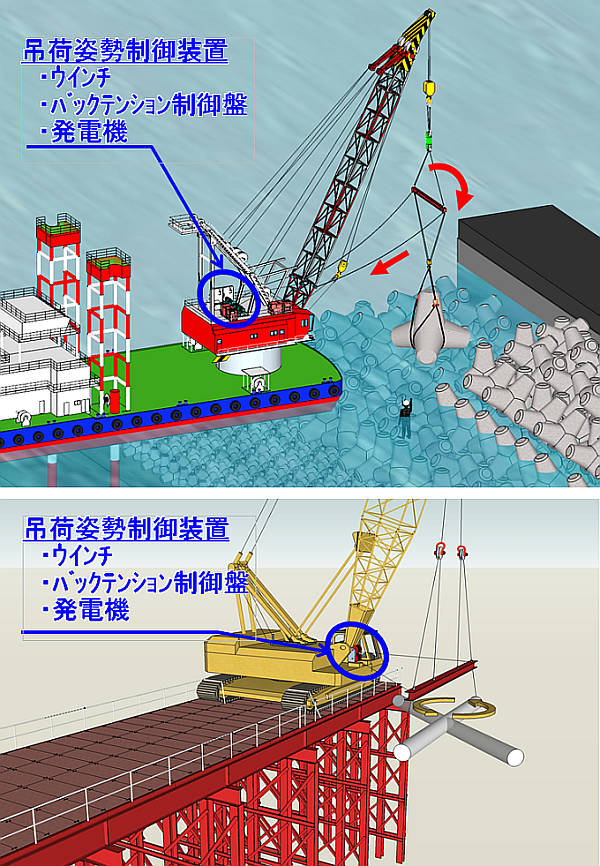
消波・根固め等のブロック類や上部工ブロック、床版等長尺物の据付作業時に、サーボ制御のウインチを用いて吊荷の動揺や方向を制御する装置。
新規性
吊荷の動揺や方向を、従来の介錯ロープを用いた人力による制御から、クレーンオペレータが遠隔操作でサーボ制御のウィンチによる牽引力を保持・調整することで制御する方法に変えた。
期待される効果
介錯ロープを使用した据付作業では、作業員の吊荷との接触・挟まれや転倒による災害の恐れがあった。また、足場の悪い据付場所では、吊荷の十分な制御が行えず、効率が低下していた。本装置を用いて吊荷の動揺や方向制御を省力化することで、安全性が向上し、施工の効率化を図ることができる。
適用条件
①自然条件
据付作業は、風波の影響を受け易いため、工事の作業中止基準を遵守する。
②現場条件
クレーン設備に本装置の設置スペース(2m×2m以上)が確保できること
③技術提供可能地域
特に制限なし
④関係法令等
クレーン等安全規則
据付作業は、風波の影響を受け易いため、工事の作業中止基準を遵守する。
②現場条件
クレーン設備に本装置の設置スペース(2m×2m以上)が確保できること
③技術提供可能地域
特に制限なし
④関係法令等
クレーン等安全規則
施工事例・施工実績
工事採用実績
- 国
- 4件
- 公
- 0件
- 他
- 0件