

海上衝突防止支援システム
2024/08/30 更新NETIS登録番号:HRK-170001-VE
概要
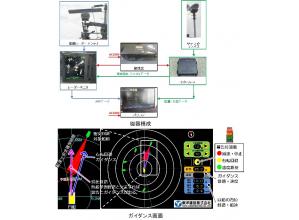
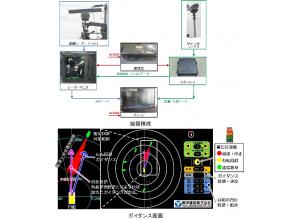
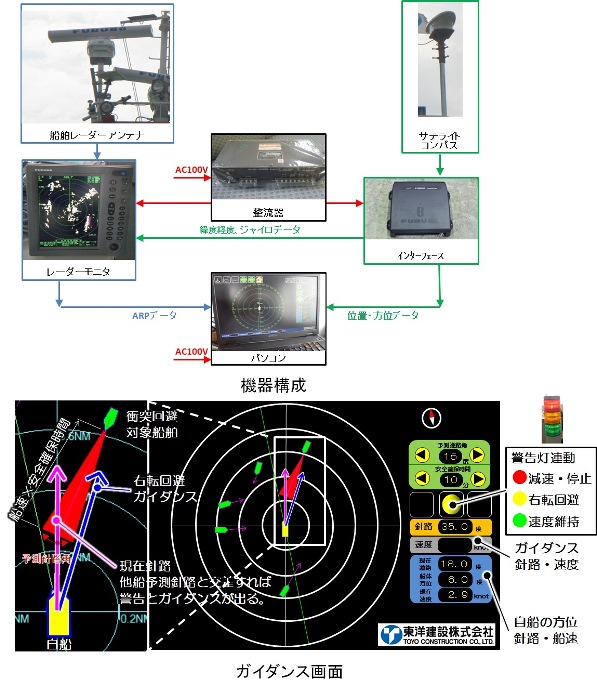
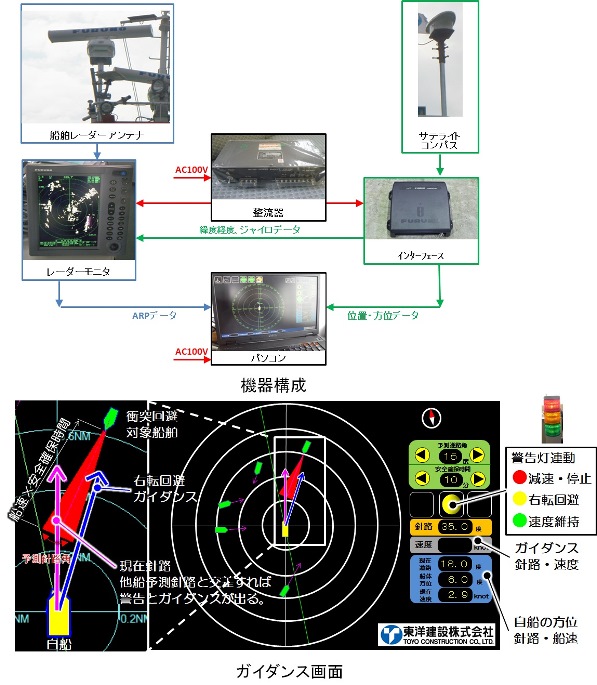
海上工事において航行中の作業船の周囲を航行する他船舶の動向をレーダーからの外部出力信号として取り出す。この信号をパソコンで処理し、自船との位置関係・針路・船速から衝突の危険性を判断し、海上衝突予防法に基づいた衝突回避行動を自動でガイダンスするシステム
新規性
従来は一般船舶と自船との位置関係は、見張員による目測で把握し、船長が避航を判断していた。船舶にレーダーが装備されている場合には、画面で位置関係を確認する。また自動衝突予防援助(ARP)機能を有するレーダーを装備している船舶では捕捉した他船舶の針路、船速、自船との距離などの情報を分析表示する。これらの情報から最接近距離(CPA:このまま進んだ際の最も接近する距離)と最接近時間(TCPA:このまま進んだ際の最も接近するまでの時間)を算定し、あらかじめ設定した閾値を下回った際に音声で警告する。このレーダーでは自船と他船が針路と速度が変化しないことを前提として警告音を発する。また接近船舶に対する避航方法は表現されない。そこで本技術では以下の改善を行った。
・レーダーからARP信号を取り出し、パソコン画面に自船と周辺船舶の位置と予測進路を表示す
る。
・衝突の可能性がある船舶(最接近時間TCPAが最小)を検出する。
・検出した船舶の予測進路は転針を想定し幅を持たせる。
・検出した船舶の予測進路と自船の針路が交差する場合には衝突の危険性があると判断して避航を音声とパソコン画面のフラッシングで警告・ガイダンスを行う。
・避航指示は、「速度維持」「減速・停止」「右転回避」とする。
・回避指示発報後に衝突の危険がなくなると表示を終了し、次に衝突の可能性がある船舶に対して避航指示の判断を行う。
・レーダーからARP信号を取り出し、パソコン画面に自船と周辺船舶の位置と予測進路を表示す
る。
・衝突の可能性がある船舶(最接近時間TCPAが最小)を検出する。
・検出した船舶の予測進路は転針を想定し幅を持たせる。
・検出した船舶の予測進路と自船の針路が交差する場合には衝突の危険性があると判断して避航を音声とパソコン画面のフラッシングで警告・ガイダンスを行う。
・避航指示は、「速度維持」「減速・停止」「右転回避」とする。
・回避指示発報後に衝突の危険がなくなると表示を終了し、次に衝突の可能性がある船舶に対して避航指示の判断を行う。
期待される効果
・捕捉した他船舶に対して自動で避航指示を行うので、避航の判断ミスや遅れといったヒューマンエラーを防止できる。
・衝突の危険性が高い船舶から順番に避航の判断を行うので多数の船舶が輻輳する海域でも、避航ガイダンスを行うので衝突の危険性を低減できる。
・衝突の危険性が高い船舶から順番に避航の判断を行うので多数の船舶が輻輳する海域でも、避航ガイダンスを行うので衝突の危険性を低減できる。
適用条件
①自然条件
特になし
②現場条件
特になし
③技術提供可能地域
特になし
④関係法令等
レーダー(検定規則による形式検定に合格したもの又は適合表示無線設備に限る。)
海上交通三法(海上衝突予防法、海上交通安全法、港則法)を優先する。
特になし
②現場条件
特になし
③技術提供可能地域
特になし
④関係法令等
レーダー(検定規則による形式検定に合格したもの又は適合表示無線設備に限る。)
海上交通三法(海上衝突予防法、海上交通安全法、港則法)を優先する。
施工事例・施工実績
工事採用実績
- 国
- 20件
- 公
- 0件
- 他
- 0件