


道路照明等点検用ロボット「ポールクライマー」
2024/05/27 更新-
概要写真
-
障害物回避
NETIS登録番号:KK-230039-A
概要
・小規模附属物である道路照明に対し、従来の高所作業車による近接目視点検に代わり点検作業を行う技術である。
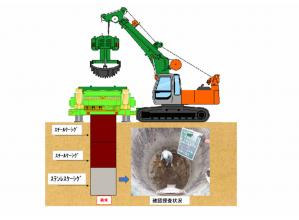
・機構により道路照明の支柱を把持し、添架物等の障害物を躱しながら搭載したカメラによる撮影、打音装置による振動データ採取を行いながら灯具まで上昇、灯具まで上昇後は、同様に支柱を把持し下降をする。
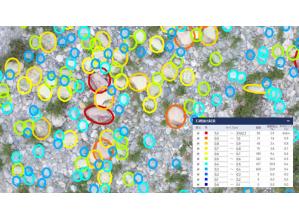
・撮影したデータ及び振動データはPC又はタブレット等に送信され、画像データよりAIが腐食等の損傷を検知、振動データにより灯具内部のボルト緩み等の異常、支柱基部の滞水等の異常を検知する技術。
新規性
道路照明の点検方法を従来の高所作業車による技術者の近接目視点検から、ポールクライマーによるカメラ撮影、打音点検及びAI、システムによる損傷解析に変えた。
期待される効果
・高所作業車による近接目視からポールクライマーによる点検に変えたことで、大掛かりな交通規制が不要となり、作業時間が短縮することで経済性向上及び工程短縮が図れる。
・ポールクライマーによるカメラ撮影、打音点検及びAI、システムによる損傷解析に変えたことで、技術者の熟練度に依らず点検を行うことが可能となり品質向上が図れる。
・ポールクライマーによる点検に変えたことで、
(1)技術者の高所での作業が不要となり、安全性の向上が図れる。
(2)大掛かりな交通規制が不要となり、渋滞の緩和が見込まれ、周辺環境への影響の向上が図れる。
(3)作業中にアイドリングストップできない高所作業車のCO2排出を削減しカーボンニュートラルに寄与できることで、周辺環境への影響の向上が図れる。
・ポールクライマーによるカメラ撮影、打音点検及びAI、システムによる損傷解析に変えたことで、技術者の熟練度に依らず点検を行うことが可能となり品質向上が図れる。
・ポールクライマーによる点検に変えたことで、
(1)技術者の高所での作業が不要となり、安全性の向上が図れる。
(2)大掛かりな交通規制が不要となり、渋滞の緩和が見込まれ、周辺環境への影響の向上が図れる。
(3)作業中にアイドリングストップできない高所作業車のCO2排出を削減しカーボンニュートラルに寄与できることで、周辺環境への影響の向上が図れる。
適用条件
①自然条件
・風速5m/sec以下
・外気温0~40℃
・降雨、降雪時は中止
②現場条件
・機材の設置及び作業スペースとして歩道等の路面に2m×2m程度必要
・外部電源が必要:DC24V~48V 最大10A
③技術提供可能地域
技術提供可能地域については制限なし
④関連法令等
特になし
・風速5m/sec以下
・外気温0~40℃
・降雨、降雪時は中止
②現場条件
・機材の設置及び作業スペースとして歩道等の路面に2m×2m程度必要
・外部電源が必要:DC24V~48V 最大10A
③技術提供可能地域
技術提供可能地域については制限なし
④関連法令等
特になし
施工事例・施工実績
施工手順
会社情報
- 会社名
- オングリットホールディングス(株)
- TEL
- 092-600-9130
- 企業情報
- 公式サイト